Extensile
Robotic fabrication workshop. Chair for CAAD, ETH Zurich, 2015

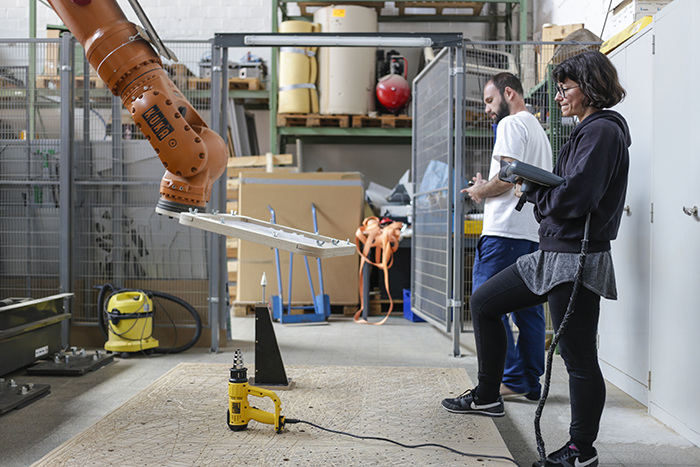
Extensile was the result of a two-week robotic fabrication workshop module taught in the postgraduate programme (MAS CAAD) of the Chair for Computer Aided Architectural Design (CAAD), ETH Zurich, by Achilleas Xydis, Mariana Popescu and Constantinos Miltiadis, in May-June 2015.
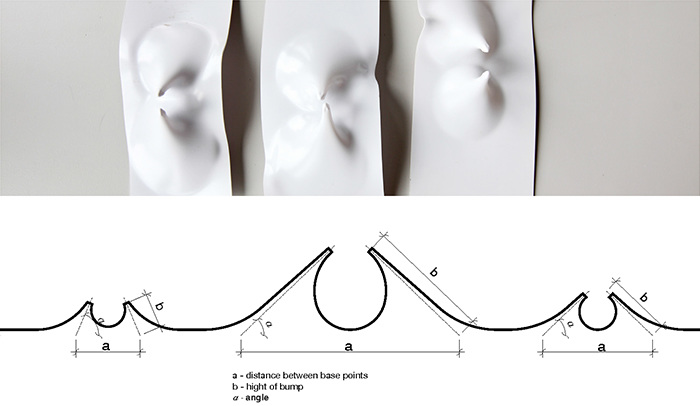
The aim of the module was to introduce robotic fabrication through experimental production methods. Therefore, we proposed a fabrication method that was neither subtractive nor additive, but rather ‘formative’. The course explored the use of thermoplastic materials –polymers that become pliable above a specific temperature and solidify again when cooled down. For this, we created a setup where the thermoplastic sheet was fixed on a wooden frame mounted on the robot. A heat gun and a formative tool-tip were arranged in adjacent stations on the floor. The fabrication workflow had the robot moving the polymer sheet on top of the heat gun, where it was locally heated for a specific amount of time, and then moved over and pushed down the tool-tip, which like a mold, deformed a pliable area of the polymer sheet.
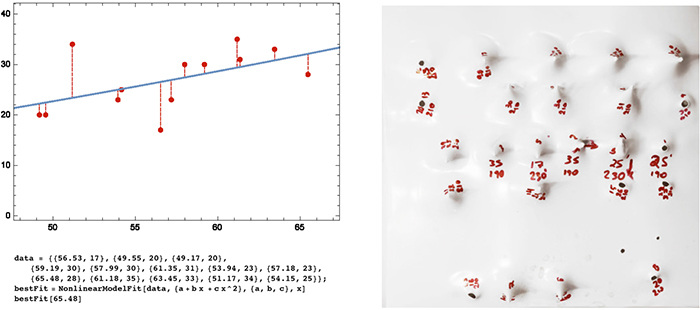
The course began with a series of tests to explore the behavior and tolerances of the mater against various parameters of head-induced deformation. The process generated a data set that described the tolerances of the material in regard to various tool tips, the height, angle and density of deformations, and the amount of heating required. This study informed the creation of parametric tools that assisted the material-specific design process and the automation of the fabrication process. In conjunction with the use of a 7-axis Kuka robot, this allowed us to design and fabricate with a high degree of controlled variation at the threshold of the material’s tolerances.
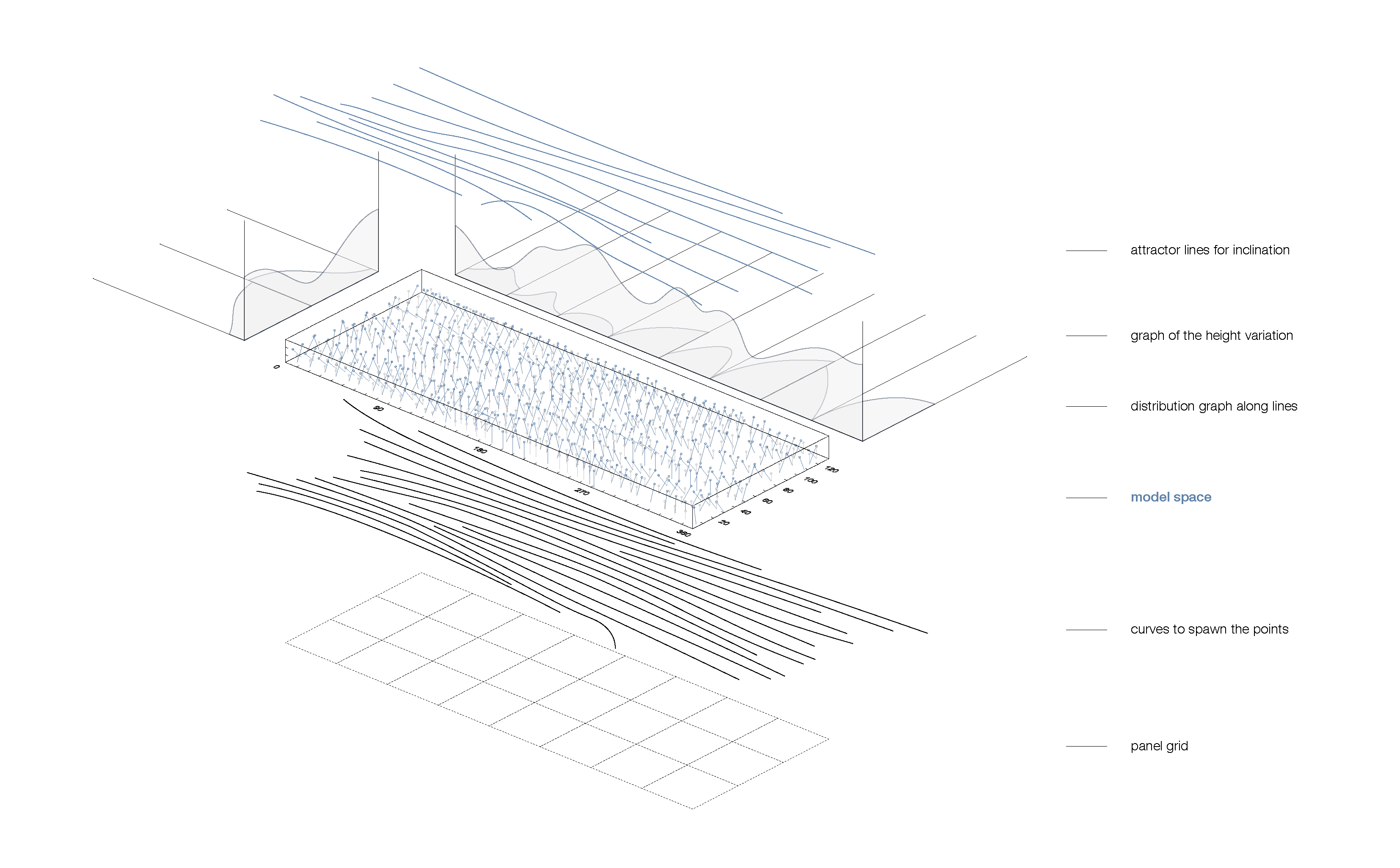
The course participants developed a panel-based construction consisting of 32 40×40 cm modules arranged in a 4x8 grid. The patterned surfaces were designed using a coplex system of probabilistic distributions developed in Wolfram Mathematica and Grasshopper. Lastly, the robot control code was generated using the KUKA|prc Grasshopper plug-in.
Extensile was presented at the Chair for Computer Aided Architectural Design on 11.06.2015



Credits
Students
Despoina Pippa, Christoph Zechmeister, José Algeciras, Alina Kvirkveliya, Tsung-Hsun Ku, Apostolos Apostolinas, Anna Maragkoudaki
Video credits
Camera: Anna Maragkoudaki, Achilleas Xydis
Editing: Anna Maragkoudaki
Sound: Blank Banshee 0: B- Start Up
Workshop instructors
Achilleas Xydis
Mariana Popescu
Constantinos Miltiadis